[Courtesy of the Korea Institute of Machinery and Materials]
Two types of grippers -- tongs and absorption -- have been separately used depending on the size of objects. While tongs types are unable to grasp if the size of the object is too large, the adsorption type couldn't hold extremely tiny and thin objects such as threads and paper.
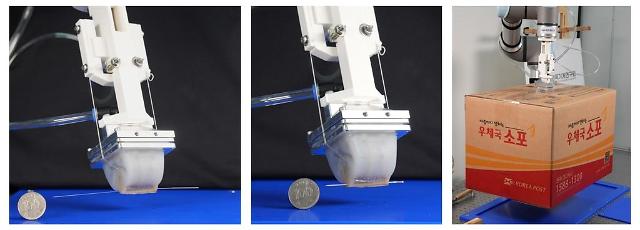
A research team led by Song Sung-hyuk at the Korea Institute of Machinery and Materials (KIMM) has developed a robot with combined features of tongs and absorption types. The newly developed model can even pick up an herbal needle, which is 0.25 millimeters in diameter, from the floor and lift a box 10 times bigger than its gripper. Without the help of complicated mechanical devices or sensors, the new model stably grasps and assembles objects. It can also transport goods.
The robot adsorbs objects using fine flow paths that make a vacuum. Because flow paths are flexible, it is deformed to match the shape of the object and adhered to each other. By adhering the soft gripper to the floor and closing its nose up while making a vacuum, thin objects can be easily grasped as it has the effect of pinching the floor with fingers. After the object is wrapped, the force surrounding the object greatly increases through the process of generating a vacuum inside.
"The elephant nose gripper in the fused form of tongs and adsorption has no risk of injury in the process of working with humans because it is soft. And it can easily handle objects of various sizes from precision parts to boxes without complicated mechanical structures or sensors, which is why it can be applied to many different industrial sectors as well as daily life," KIMM's AI robot research division head Park Chan-hun said in a statement on October 20.
reporter

Kim Joo-heon
jhkim123@ajunews.com