[Courtesy of KAIST]
While many autonomous robots on wheels or caterpillars are being developed around the world, some robots have legs because the limbs have the advantage of being able to travel through difficult terrains such as a rocky mountain ridge or dense forest with many fallen trees. However, it is harder to develop multi-limbed robots because all limbs must move in harmony to maintain balance and agility.
A reinforced learning process is a type of machine learning for artificial intelligence. The learning method aims to teach AI the best action to take in certain situations. A reward is given after every effective action so that AI would seek the action that would grant the largest amount of reward.
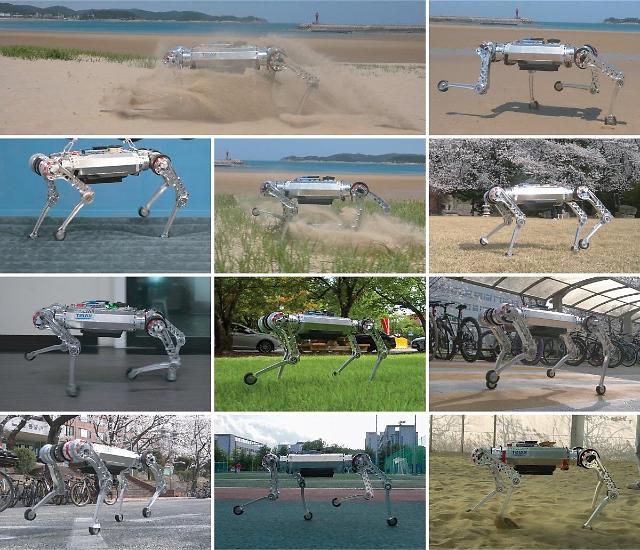
The Korea Advanced Institute of Science & Technology (KAIST) said that its research team has developed a quadrupedal robot using the reinforced learning technique. "The robot proved its stability on deformable terrains through various demonstrations including running along the beach at high speed while freely moving on an air mattress," the institute said in a statement on January 26.
Researchers said that they simulated various deformable terrains for the robot to learn how to overcome such grounds with an unstable foothold. A neural network for the prediction of terrain characteristics was developed based on a recurrent visual data analytics neural network. Thanks to the simulated ground characteristics and neural networks, the quadrupedal robot was able to adapt quickly to new environments.
"The researched robot controller can be used for various research projects involving walking robots because it does not require analyzed data for target terrains," KAIST researcher Choi Soo-young said.
reporter

Park Sae-jin
swatchsjp@ajunews.com


